Simscape Multibody provides a simulation environment for 3D mechanical systems like robots, suspensions, and landing gear. Build models using blocks for bodies, joints, forces, and sensors, or import complete CAD assemblies with geometry, mass, and constraints. Visualize motion with auto-generated 3D animations.
Use MATLAB to parameterize models and Simulink to design control systems. Integrate with hydraulic, electrical, and pneumatic systems using Simscape components. Generate C code for deployment to HIL and other simulation platforms.
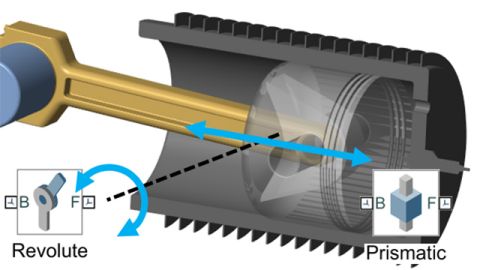
Create multibody models of any 3D mechanism. Define parts using parameterized 3D geometry or CAD data. Connect parts with joints to define degrees of freedom.
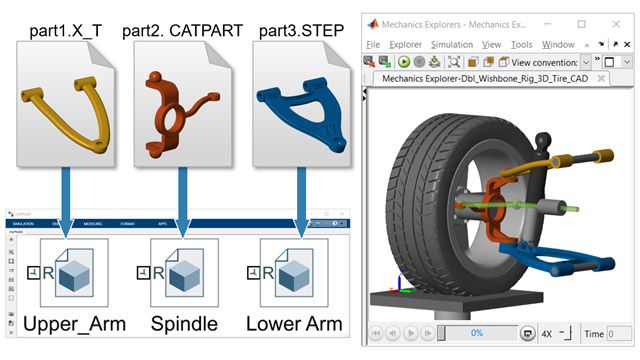
CAD Import
Automatically convert CAD designs into a digital twin, referencing files from CATIA®, Creo™, Inventor®, NX™, Solid Edge®, SolidWorks®, and Parasolid®.
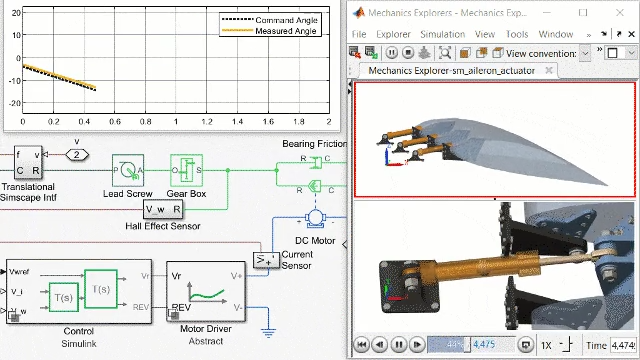
Electric and Hydraulic Actuation
Integrate electronic, hydraulic, and pneumatic systems with 3D mechanical models to assess actuator performance.
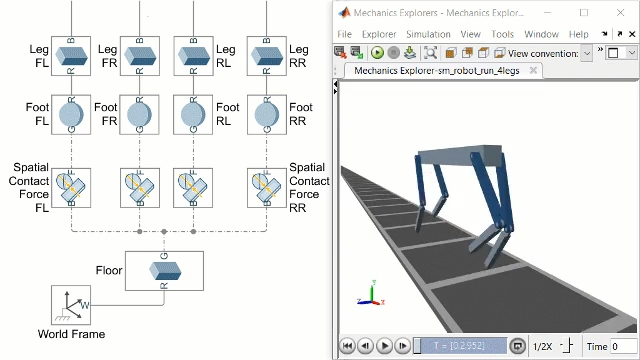
Contact Forces
Model intermittent and persistent contact between parametric and CAD-defined solids, define custom force laws, and use tire models for road interaction.
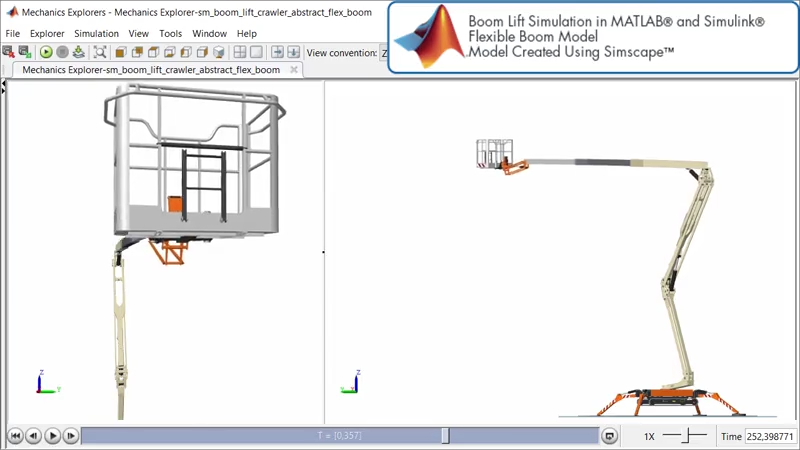
Flexible Bodies
Model flexible bodies with theoretical or FEM methods, vary properties in MATLAB, and analyze effects of extension, bending, and torsion.
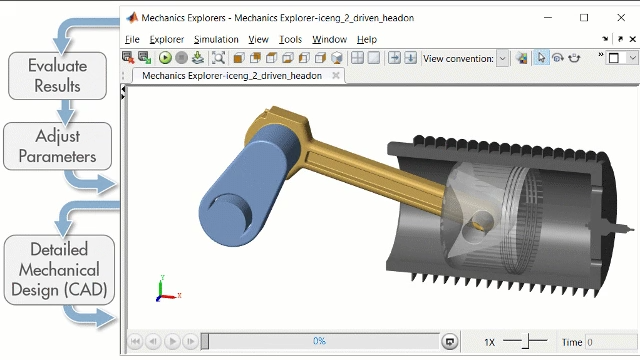
Parametric Design
Use MATLAB to vary parameters like length, mass, and voltage, and run dynamic simulations with abstract models to speed up mechanical design.
Model Deployment
Convert Simscape models to C code to test control algorithms and run HIL tests on dSPACE®, Speedgoat, OPAL-RT, and other real-time systems before physical testing.
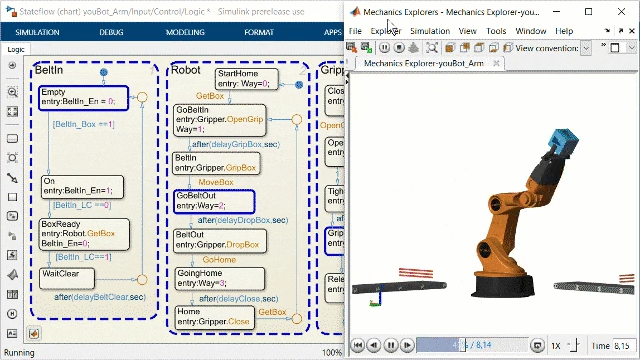
MATLAB and Simulink
Use MATLAB to automate model assembly, testing, and post-processing, and Simulink to integrate control and hardware design in one environment.
From Research To Production
Simscape models refine requirements, design controls, test embedded systems, and enable digital twins for in-service support.