UAV Toolbox offers tools for designing, simulating, testing, and deploying UAV and advanced air mobility (AAM) systems. It supports the development of flight controllers, autonomy algorithms, and mission plans, along with interactive analysis of flight paths and telemetry using the Flight Log Analyzer app. You can simulate UAV scenarios with realistic sensor models—such as camera, lidar, IMU, and GPS—in both photorealistic 3D and 2.5D environments, supporting both desktop and hardware-in-the-loop (HIL) workflows. The toolbox includes reference examples for applications like drone package delivery and VTOL aircraft, and enables C/C++ code generation for rapid prototyping and deployment to platforms like the Pixhawk® Autopilot.
Create UAV simulation scenarios with sensor models and synthetic data to test autonomous flight algorithms in realistic environments. Visualize missions and behaviors in a photorealistic 3D world using Unreal Engine® from Epic Games®.
Controller Deployment and HIL Testing with PX4
Design, test, and deploy flight control algorithms using Pixhawk® and PX4 Autopilots. Validate your controllers and autonomy logic through hardware-in-the-loop (HIL) simulations with Pixhawk hardware and Simulink-based plant models.
Flight Log Analysis
Use the Flight Log Analyzer app to interactively analyze UAV telemetry data. Import logs in formats like TLOG, ULOG, ArduPilot dataflash, or custom types, and visualize the data using built-in or customizable plots.
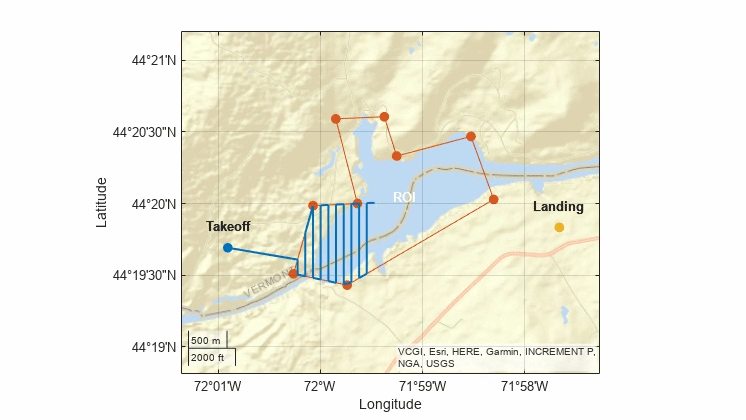
UAV Autonomy Algorithms
Design and simulate autonomous missions for both fixed-wing and multirotor UAVs using waypoint navigation, orbiting behaviors, and flexible path planning algorithms.
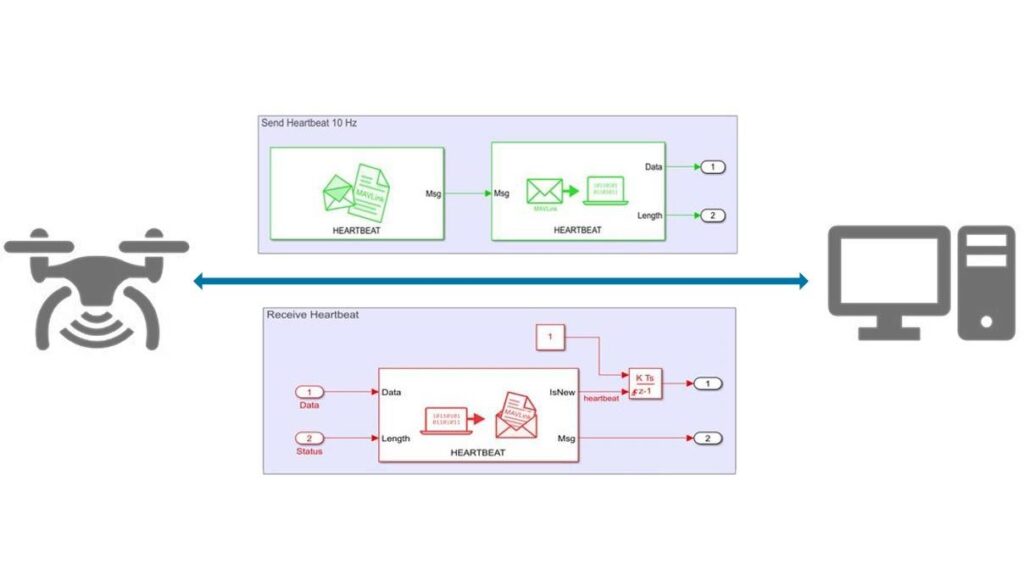
MAVLink Connectivity
Connect UAVs and ground control systems using the MAVLink protocol to exchange telemetry, upload flight plans, and adjust system parameters efficiently.